GNSS-R: Simulator design of a GNSS-Reflectometry simulator
Project Description
We are looking into Global Navigation Satellite System Reflectometry (GNSS-R) for maritime surveillance. This is a new technology that looks promising for detecting ships that does not want to be found – so called dark ships. GNSS-R works similar to a bi-static radar (see below), by correlating the reflected signal of the Earth’s surface or objects below with the direct signals (or code replicas) coming from the GNSS satellites in medium Earth orbit.
The localization of the reflected signal can be assumed calculated by the geometry of the GNSS satellite and the receiving satellite. To assess the usability of the principle, we have developed a coverage simulator using Python with the SkyField libery for orbital computations.
This GNSS-R simulator can be used to evaluate the expected coverage for GNSS-R as a signal-of-opportunity for ship detection, and other use cases.
Metrics we wish to extract:
- How many possible ship detections can we see per “coverage area” / area of interest using a combination of GNSS constellations?
- With adding realistic ship tracks (can simulate tracks based on AIS-data), can we assess now many “pings” we can get per ship per time unit (<day|week>)?
- How many satellites would we require to cover a given defined area?
About Global Navigation Satellite System Reflectometry (GNSS-R)
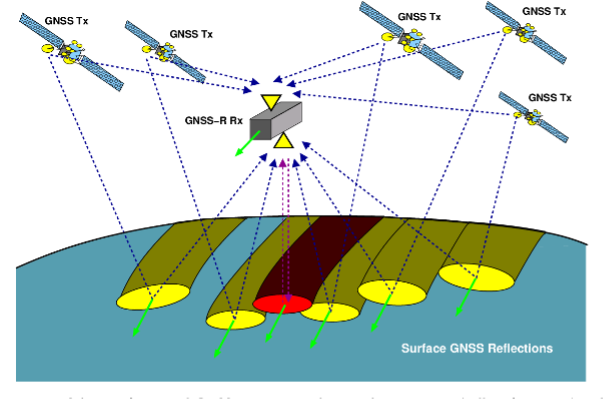
GNSS-R operates as a bi-static radar using Earth-illuminating GNSS signals from GPS, GLONASS, Beidou, and Galileo satellites at around 20,000 km altitude. These signals, reflected off the Earth's surface and objects, can be measured by LEO satellite antenna receivers at about 600 km altitude. By installing an GNSS antenna on the zenith side and a GNSS-R antenna on the nadir side of the LEO satellites, 3D positioning of reflective points and analysis of surface in the glistering zone is possible.
Until recently, the primary remote sensing applications of spaceborne GNSS-R focus on the analysis of the sea-state (local wind speed, sea surface roughness, sea altimetry), soil moisture, biomass and vegetation estimation, sea-ice sheets analysis (height, volume, sea/ice index) and tsunami warning. An early study has also shown that oil spills can be detected. We will focus on the ability to detect and localize anomalies near the ocean surface
Impact
Space technology plays a crucial role in achieving various Sustainable Development Goals (SDGs) set by the UN. GNSS-R has the capability to be an all-weather, near real-time detection space-based surveillance system independent clouds and systems based on trust and self-reporting such as AIS. GNSS-R has the potential to allows us to detect and monitor water vessels at sea and localize GNSS inference sources originating from sea or land. This project target
-
SDG9 Industry, innovation, and infrastructure. The outcomes have an innovative and commercial potential for industry and can contribute both to new space-based infrastructure and protection of existing critical infrastructure beyond GNSS.
-
SDG12 Responsible consumption and production. As the outcomes will improve monitoring capacity of activities in the oceans, it will be easier to detect and stop illegal unreported, unregulated (IUU) fishing.
-
SDG14 Life below water. Same argument as with SDG12.
-
SDG16 Peace, justice and strong institutions. Maritime surveillance and GNSS interference monitoring are both relevant for this.
Tasks and Expected Outcomes
- The student should add ship-tracks to the simulator, and the capability of simultaneous make use of both GPS and Gallileo satellites.
- Carrie out coverage analysis and extract the metrics such as:
- How many ships can be detected?
- What is the detection rate with a given coverage (satelitte constellation, satelitte orbit etc)?
- How many satellites are needed for ship detections at a given rate in each area?
- Other relevant task depending on progress and direction of the thesis work.
Who We Are Looking For
We are seeking a highly motivated final year student in Cybernetics, Electronics, or a related field with an interest in signal processing and remote sensing applications. Experience with signal processing techniques is not mandatory. The project will be adapted to the student's background and goals.
How we work
The student will be part of the NTNU SmallSat lab, a lab which typically hosts 10-20 master's student per semester. At the NTNU SmallSat Lab we encourage collaboration and try to get our group to help each other. To facilitate this, we as well as arrange common lunches and workshops where the students and supervisors can learn from each other. I some project we also implement a development process.
Supervisor(s)
For further questions please contact:
- Tor Arne Johansen (main supervisor, NTNU/ITK), Roger Birkeland (co-supervisor, NTNU/IES), Roger Birkeland (co-supervisor, NTNU/IES), Corrado Chiatante (co-supervisor, NTNU/IES)
- Roger Birkeland (main-supervisor, NTNU/IES), Corrado Chiatante (co-supervisor, NTNU/IES)