GNSS-R: GNSS jamming and spoofing source localization from a small satellite
Project Description
We provide several specializations project aims at exploring how Global Navigation Satellite System Reflectometry (GNSS-R) from a small satellite in a Low Earth Orbit (LEO) can enable solutions to several important challenges for maritime mapping, monitoring, and surveillance
The focus of this project will focus on GNSS interference localization. The number of GNSS malicious interference events (jamming and spoofing) are increasing. Loss of GNSS signals due to jamming or altered signals due spoofing are problematic since GNSS is used for navigation and timing on land, at sea and in the air. GNSS-based timing is even used to synchronize the electric grid and is a time source in mobile cellular networks. Therefore, GNSS interference is illegal. Localization of such jammers (and spoofers) on lands is done manually by personnel in a car. Localizing jamming originating from sea and from the air is more challenging today. An interesting potential solution would be to localize GNSS interference sources from LEO using GNSS-R satellites.
Jamming and spoofing signals will influence GNSS signals reflected from Earth’s surface (sea or land) measured by the GNSS-R satellite as shown in the figure below. The GNSS-R satellite can potentially also measure direct/non-reflected interference signals originating below it.
Since the GNSS-R satellite in LEO can receive direct signals from the medium Earth orbit (MEO) GNSS satellites above it, the GNSS-R satellite will have access to GNSS position and velocity information even if there is a powerful malicious GNSS interference event below it. Because of this, GNSS can be used to position the GNSS-R satellite and localize interference sources relative to the GNSS-R satellite.
About Global Navigation Satellite System Reflectometry (GNSS-R)
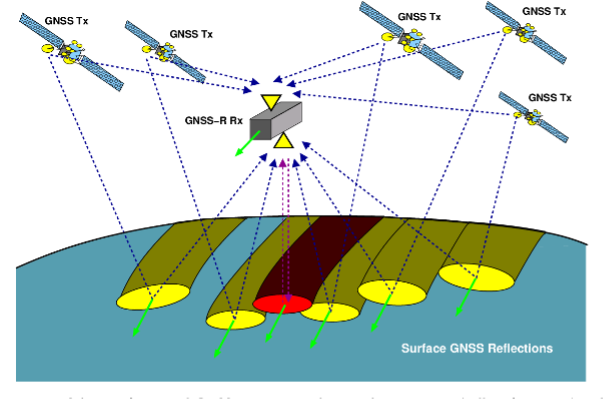
GNSS-R operates as a bi-static radar using Earth-illuminating GNSS signals from GPS, GLONASS, Beidou, and Galileo satellites at around 20,000 km altitude. These signals, reflected off the Earth's surface and objects, can be measured by LEO satellite antenna receivers at about 600 km altitude. By installing an GNSS antenna on the zenith side and a GNSS-R antenna on the nadir side of the LEO satellites, 3D positioning of reflective points and analysis of surface in the glistering zone is possible.
Until recently, the primary remote sensing applications of spaceborne GNSS-R focus on the analysis of the sea-state (local wind speed, sea surface roughness, sea altimetry), soil moisture, biomass and vegetation estimation, sea-ice sheets analysis (height, volume, sea/ice index) and tsunami warning. An early study has also shown that oil spills can be detected. We will focus on the ability to detect and localize anomalies near the ocean surface. GNSS interference is also an option.
Impact
Space technology plays a crucial role in achieving various Sustainable Development Goals (SDGs) set by the UN. GNSS-R has the capability to be an all-weather, near real-time detection space-based surveillance system independent clouds and systems based on trust and self-reporting such as AIS. GNSS-R has the potential to allows us to detect and monitor water vessels at sea and localize GNSS inference sources originating from sea or land. This project target
Space technology plays a crucial role in achieving various Sustainable Development Goals (SDGs) set by the UN. GNSS-R has the capability to be an all-weather, near real-time detection space-based surveillance system independent clouds and systems based on trust and self-reporting such as AIS. In Norway, space has a crucial role to play in our collective security and monitoring of critical infrastructure and the Arctic region. GNSS-R has the potential to allows us to detect and monitor water vessels at sea and localize GNSS inference sources originating from sea or land. This project target
- SDG9 Industry, innovation, and infrastructure. The outcomes have an innovative and commercial potential for industry and can contribute both to new space-based infrastructure and protection of existing critical infrastructure beyond GNSS.
- SDG16 Peace, justice and strong institutions. Maritime surveillance and GNSS interference monitoring are both relevant for this.
Tasks and Expected Outcomes
The objective of the project is investigating different potential jamming localization techniques/principles in simulation. Examples such techniques/principles are:
- Received signal strength (SSR)
- Angle of arrival (AOA)
- Time difference of arrival (TDOA)
- Frequency difference of arrival (FDOA) / Doppler
Possible tasks could include analysing their strength and weaknesses, potential accuracy, systems requirements such as coverage and revisit time etc.
Direct collaboration with other students working on GNSS-R related projects is possible.
Who We Are Looking For
We are seeking a highly motivated final year student in Cybernetics, Electronics, or a related field with an interest in estimation and localization. Experience from subjects such as TTK4150 Sensor Fusion will be beneficial for the student in this project. Experience with signal processing techniques is not mandatory. The project will be adapted to the student's background and goals.
How we work
The student will be part of the NTNU SmallSat lab, a lab which typically hosts 10-20 master's student per semester. At the NTNU SmallSat Lab we encourage collaboration and try to get our group to help each other. To facilitate this, we as well as arrange common lunches and workshops where the students and supervisors can learn from each other. I some project we also implement a development process.
For further questions please contact Torleiv Håland Bryne
https://www.ntnu.no/ansatte/torleiv.h.bryne