Modeling, design and optimal operation of shore to ship charging Systems for all-electric and plug-in hybrid ferries (S2SC)
Modeling, design and optimal operation of shore to ship charging systems for electrified ships (S2SC)
Researcher: Siamak Karimi
Goal
Developing models and solutions for reliable and efficient design and operation of shore to ship power transfer and battery charging. The developed methods can also be applied to offshore charging.
Background
Electrification of marine vessels has become an important and efficient solution for moving toward the zero and low-emission sea transportation. Existing technologies for reducing emissions include diesel-electric, hybrid and fully battery-electric propulsion systems. While hybrid or plug-in hybrid propulsion systems can reduce the consumption of fossil fuels, fully battery-electric solutions can eliminate all emissions from regular operation. Hybrid propulsion systems allows for onboard batteries to be recharged by diesel generators or discharged to supply peak loads. Furthermore, another way to recharge the onboard batteries is shore charging which can allow for sustainable energies, such as wind, solar and hydropower energies available in onshore power systems to be utilized for propulsion in the onboard power system. Often, the electricity generated on land is also cheaper and more sustainable than the electricity generated by onboard diesel engines. For instance, in Norway, more than 90 percent of national electricity demand is produced by renewable energy such as hydropower energy.
The main challenge of using batteries in maritime vessels is their low energy density. In other words, a marine battery pack which weighs about tens of tones and spaces hundreds of square meters cannot guarantee the propulsion power for long distances. Thus, due to the current range limitations of marine batteries, they are often installed on short-distance and coastal ferries. With tight schedules for short-distance ferries, it is important to take advantage of docking time efficiently, introducing the need for fast charging. Another challenge of shore-charging systems for motor/car ferries is that usually the ports are located in remote areas with limited capacity in the local power grid. This means that the local grid may not be able to provide high power demand for fast charging. To overcome this challenge, stationary energy storage systems are used as energy buffers and to support the weak grid during the charging. However, these stationary batteries introduce other challenges such as the excessive energy loss and reliability of multiple battery systems. Therefore, energy efficiency and reliability have to be taken into account in the design phase.

Figure 1: Shore charging for all-electric or hybrid ships
State-of-the-art
The first evaluated shore-to-ship charging topology is based on AC charging with all energy transferred to the ship by an AC connection. For small fishery and leisure battery-driven boats, charging from a 3-phase 400V AC source is the most common solution for shore charging because having access to a 400V AC source is more convenient than a fast charging station with several expensive equipment. As a result, fishermen and sailors would not have limited routes to explore due to the availability of 400V AC sources. However, for passenger or car ferries which require more power to recharge their onboard batteries, an infrastructure or a dedicated substation should be established. Depending on the number of vessels stop at a port and their onboard battery capacity, the power rating of the port infrastructure may change.
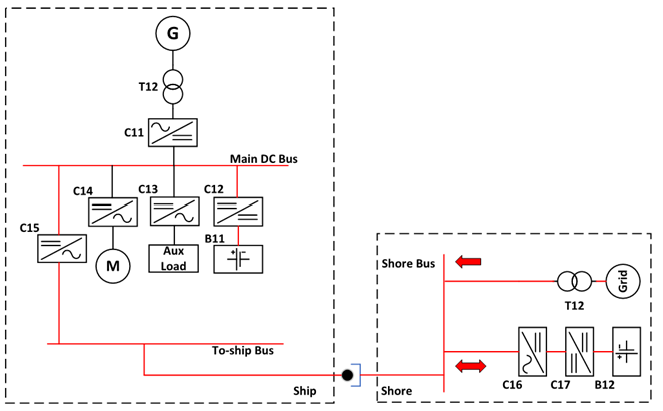

Figure 2: An example of power architecture of an AC-coupled shore charging system
inductive charging is a promising charging solution thanks to its contactless connection. In Wartsila Inductive charging system for MF Folgefun, as it is depicted in Figure 10, a robotic arm was used for carrying the onshore, transmitter, coil and approach it close to the receiving coil on ship. In inductive charging, the misalignment of coils and the distance between them can highly affect the transmission power efficiency, so using an automatic arm for accurate positioning is necessary, especially in extreme weather conditions. Since the plug connection part is eliminated in inductive charging, the process can be started as soon as ferry is close enough to port, so by utilizing wireless communication between ferry and the port, the onshore robot arm gets ready for approaching the receiver coil.
Scope
First, an analytical model of charging process starting from the onshore grid and onshore batteries to the onboard power system is necessary for assessing the performance of shore charging. Such analytical model consists of the averaged and instantaneous model of power converters in the charging path, onshore and onboard battery model and interconnection model, either wireless or wired. By so doing, an evaluation of energy efficiency for different charging plans with different structures can be carried out. Since power electronics devices and components are improving day by day in terms of size, efficiency and reliability, a design platform for comparing the current and future solutions for different applications is useful for adaptation of ever-growing battery-powered marine vessel fleet. In this regards, different power architectures for shore charging stations are analyzed with respect to the energy efficiency, cost and reliability.
Regarding control and power management of shore charging, there are two levels of control in a charging system such as low level and high-level control: 1) low level control includes the control of power converters, namely power control and voltage control depending on the mode of operation; 2) high level control includes the power management system which generates the power and voltage set-points for stable and efficient operation of the power system during the charging process. It also includes the onshore and onboard battery management systems which are responsible for the state of the charge (SoC) and state of the health (SoH), thermal management and cell balance. In a smart charging station, the efficient control commands are issued based on the ferry schedule, onshore and onboard SoC, and local grid capacity. Thus, presenting an intelligent and robust power and energy management system compatible for shore charging is another focus of this project.
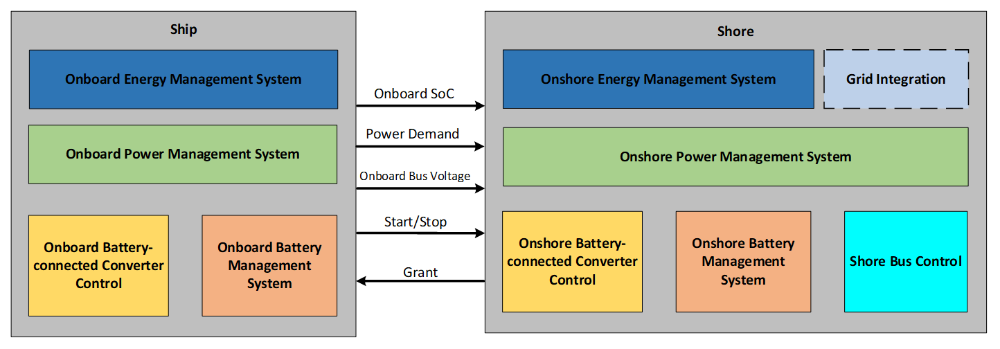

Figure 3: An example of system-level control for shore charging systems
Project Partners
Norwegian University of Science and Technology (NTNU)
Centers for Research-Based Innovation (SFI) Smart Maritime
Project Duration
September 2019 - September 2022